گشتاوری ورتکس
کنترل گشتاور در اینورتر ورتکس
گشتاور چیست؟
در هر حرکت چرخشی یک کمیت فیزیکی بنام گشتاور وجود دارد که واحد آن نیوتون – متر است . گشتاور یک کمیت نسبی است و نسبت به یک نقطه مبداء سنجیده شده و بر حسب رابطه مقابل محاسبه می گردد . 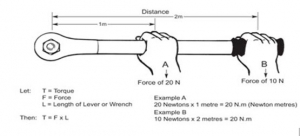 T=f.r
T=f.r
عکس بالا نشان می دهد که چگونه شما گشتاور ثابتی به یک مهره وارد می کنید در حالیکه مقدار نیروی متفاوتی صرف این عمل می شود . زمانیکه شما از قسمت A بر مهره فشاروارد می کنید مقدار نیروی مورد نیاز 20N است و زمانیکه از ناحیه B بر مهره فشار وارد می کنید مقدار نیروی مورد نیاز 10N خواهد بود .با توجه به رابطه اصلی گشتاور ( T=F.R ) میزان گشتاور با افزایش مقدار R و ثابت نگهداشتن نیرو بیشتر خواهد شد.
مد کنترل گشتاور چیست؟
مد کنترل گشتاور برای برخی کاربردها نظیر دستگاههای کشش و سیم جمع کن و…. کاربرد دارد که در اصطلاح به آن Tension می گویند.در این کاربردها نیاز به داشتن گشتاور ثابت است .بطور مثال در سیم جمع کن زیر از یک motion controller برای کنترل موتورهای متصل به سیم جمع کن استفاده شده است ولی اگر از لحاظ اقتصادی امکان استفاده ازیک کنترلر وجود نداشته باشد بهترین راه ، استفاده از یک سرو موتور برروی سیم جمع کن در مد کاری torque است .
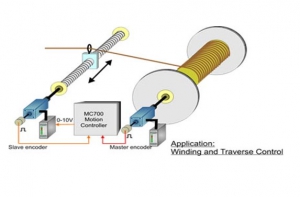
مقدار سیم ورودی در واحد زمان همان طور که قابل استنباط است ثابت می باشد .ولی مقدار سیم جمع شده برای یک قرقره خالی نسبت به یک قرقره تا نیمه پر شده متفاوت است و این تفاوت باعث فشار بر روی سیم می شود بنابراین باید از سرعت قرقره جمع کن با افزایش قطر سیم جمع کن کاسته شود تا مقدار سیم جمع شده در واحد زمان همچنان ثابت باشد .
همانطور که اشاره شد با افزایش قطر قرقره جمع کننده سیم ها میزان گشتاور اعمال شده روی سیم و در نهایت موتور افزایش می یابد و بدین ترتیب با گرفتن فید بک از موتور می توان مقدار گشتاور ثابتی بر روی سیم ایجاد کرد که این کار با تنظیم سرعت موتور امکان پذیر است .
.
اینورتر ورتکس در حالت حلقه باز قابلیت های مطلوبی در مد کنترلی گشتاور دارد. برای کاربردی مانند سیم جمع کن کافی است اینورتر را در کنترل گشتاور قرار دهید آنگاه نیاز به تنظیم منبع کنترل گشتاور که می تواند از طریق کی پد اینورتر و یا ولوم آنالوگ خارجی باشد خواهد بود در ادامه اینورتر با توجه به مقدار گشتاور مطلوب تلاش می کند گشتاور اعمالی به موتور را ثابت نگه دارد. بطوریکه هر زمان مقدار گشتاور دریافتی موتور از مقدار مطلوب بیشتر باشد سرعت موتور را کاهش می دهد و هر زمان از گشتاور مطلوب کمتر باشد سرعت موتور را افزایش می دهد و بدین ترتیب تلاش می کند با کم و زیاد کردن سرعت موتور گشتاور خروجی اعمال شده به موتور را بر روی مقدار مطلوب ثابت نگه دارد. قابل ذکر است حداکثر سرعت اعمالی به موتور را نیز می توان از طریق ولوم دوم می توان محدود کرد.
برای بالا بردن دقت اینورتر در کنترل گشتاور بهتر است کمیت های پلاک موتور را در پارامترهای مربوط به گروه 11 اینورتر وارد شود در صورت امکان انجام اتوتیونینگ این عمل هم می تواند عملکرد کنترلی گشتاور را بازهم بهبود ببخشد. بدیهی برای کنترل گشتاور مد کنترلی اینورتر باید بر روی مد کنترلی وکتور قرار گیرد.
پارامترهای مد کنترلی گشتاور اینورتر ورتکس
وکتور کنترل P00.04 =1
مد گشتاور P00.05 =1
توان موتور= P11.02
ولتاژنامی موتور=P11.03
جریان نامی موتور= P11.04
فرکانس نامی موتور =P11.05
سرعت نامی موتور= P11.06
اتوتیونینگ موتور P11.10 = 1
ست پوینت یا مقدار تنظیمی گشتاور P14.00 = 1 (AI1)
ضریب مقدار تنظیمی گشتاور P14.02 = 100%
مقدار گشتاور مطلوب P27.09 = P14.00 * P14.02
حداکثرسرعت موتور P14.05 =2 (AI2)
P14.07 = 0
گشتاور خروجی موتور= P27.08
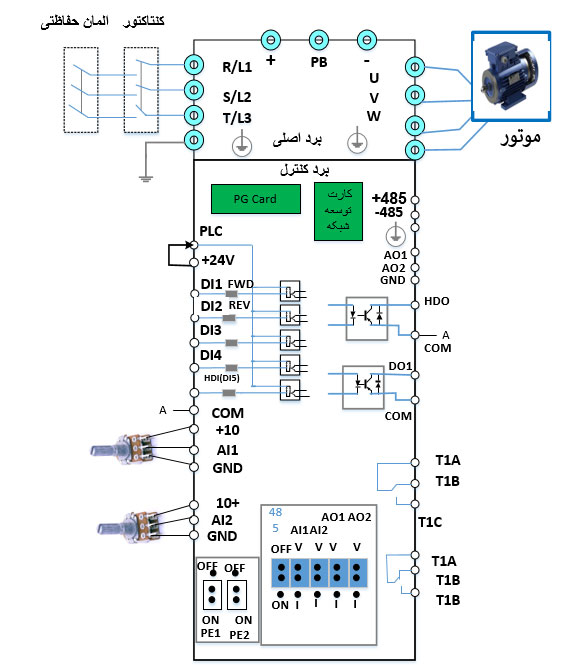
شکل 3:شماتیک کنترل گشتاور در اینورتر ورتکس



دیدگاه خود را ثبت کنید
میخواهید به بحث بپیوندید؟احساس رایگان برای کمک!