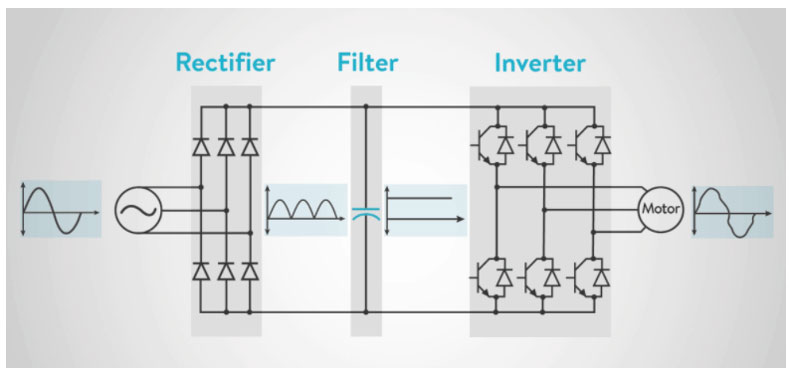
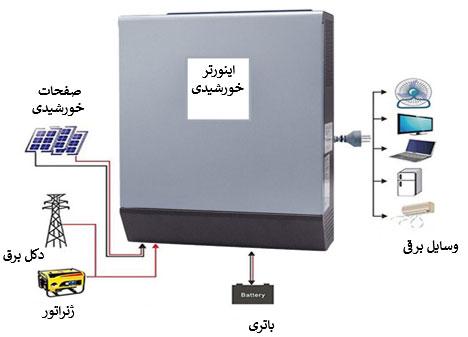
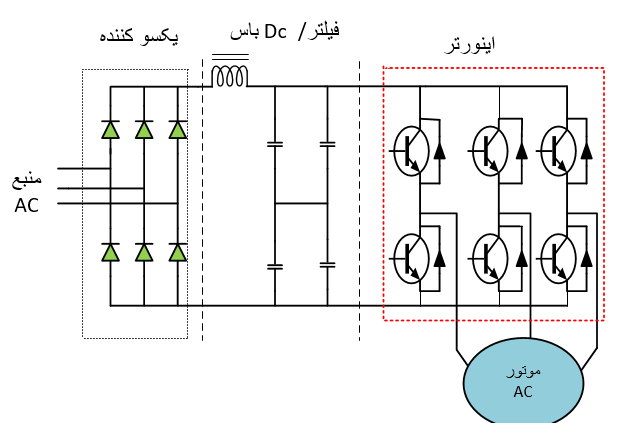
شاید برایتان این سوال پیش آمده که اینورتر خورشیدی چیست؟ یا چگونه کار می کند؟ اینورتر خورشیدی وسیله ای است که قادر است برق DC را به AC تبدیل کند. اینورترها اجزای معمولی سیستم های برقی خورشیدی هستند زیرا صفحه های خورشیدی برق DC تولید می کنند و بیشتر دستگاه های مورد استفاده در خانه ها یا دفاتر با ولتاژ AC کار می کنند.بسته به اندازه آن ، یک سیستم فتوولتائیک می تواند یک اینورتر منفرد یا چند سیستم را تشکیل دهد.
متصل به صفحه خورشیدی (متصل به شبکه) و غیر متصل به صفحه خورشیدی (خارج از شبکه) .
اگرچه عملکرد اصلی اینورتر همیشه یکسان است( تبدیل برق DC به AC) این دو نوع سیستم خورشیدی از انواع مختلفی از اینورترها استفاده می کنند.
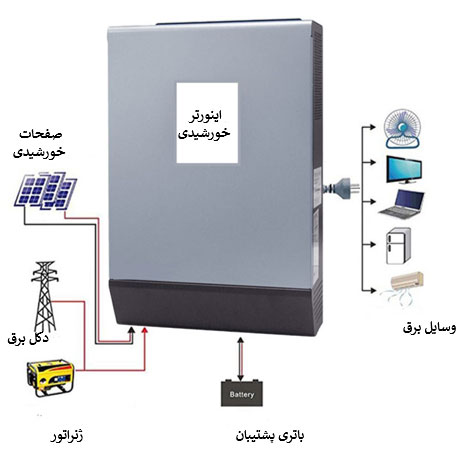
شکل 1:اینورتر خورشیدی
اینورترها برای سیستم های شبکه خورشیدی نوع متصل به شبکه بدون باتری پشتیبان
اینورتر قلب هر سیستم خورشیدی نوع متصل به شبکه است بنابراین هر سیستم متصل به شبکه باید دارای اینورتر باشد.اینورتر نوع متصل به شبکه ولتاژ DC را از آرایه خورشیدی به ولتاژ AC تبدیل می کند که می تواند بلافاصله مورد استفاده قرار گیرد یا به شبکه موردنظر ارسال شود.
به عنوان یک قاعده ،اینورترهای متصل به شبکه بدون باتری پشتیبان دارای قابلیت نصب بسیار کارآمد و ساده هستند. اینورتر متصل به شبکه تنها در هنگام روشن بودن دستگاه کار می کند. وقتی دستگاه خاموش می شود ، اینورتر متصل به شبکه بلافاصله خاموش می شود. بیشتر اینورترهای متصل به شبکه مبتنی بر حداکثر قدرت نقطه پیگیری (MPPT) هستند – ویژگی فشرده سازی حداکثر توان ممکن در یک فشار از آرایه PV .
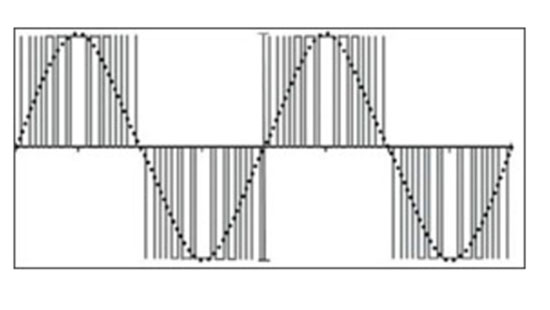
اینورتر مستقیماً یا از طریق سیستم برق ساختمان به دستگاه وصل می شود. در صورت اتصال مستقیم ، برق AC تولید شده به سمت دستگاه ارسال می شود. در صورت اتصال از طریق سیستم برق ساختمان ، ابتدا برق AC تولید شده توسط سیستم PV توسط وسایل برقی مصرف می شود و آنچه بلااستفاده باقی می ماند ، به دکل برق هدایت می شود. اینورترمتصل به شبکه باید کاملاً با الزامات و مقررات دکل برق مطابقت داشته باشد. به عنوان مثال ، اینورترهای متصل به شبکه باید ولتاژ AC را به شکلی کاملا سینوسی تولید کنند. یکی از ویژگی های اصلی اینورتر متصل به شبکه این است که در صورت وجود خرابی در شبکه متوقف می شود.بنابراین تکنسین هایی که هرگونه کار تعمیر را در دکل برق انجام می دهند از خطر برق گرفتگی الکتریکی محافظت می شوند .اینورتر خورشیدی می تواند یا یک بلوک مجزا باشد که در خارج از آرایه خورشیدی قرار دارد یا به صورت فیزیکی در پنل های خورشیدی ادغام شده باشد. از آنجایی که هر یک از اینورترهای متصل به شبکه در حین قطع شبکه از کار می ایستند ، بنابرین در این زمان نیروی الکتریسیته نیز وجود ندارد.
به طور کلی دو نوع اینورتر برای سیستمهای متصل به شبکه بدون باتری پشتیبان وجود دارد :
اینورترهای رشته ای و اینورترهای میکرو.
اینورتر رشته ای چیست؟
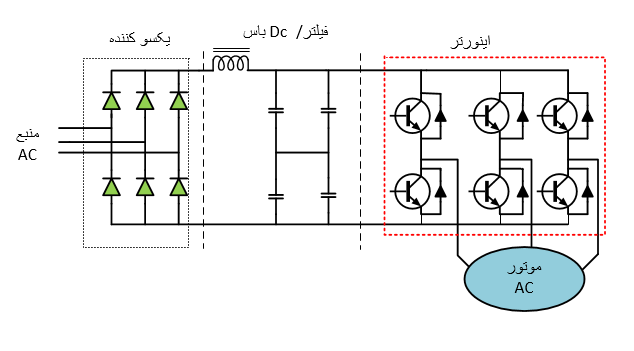
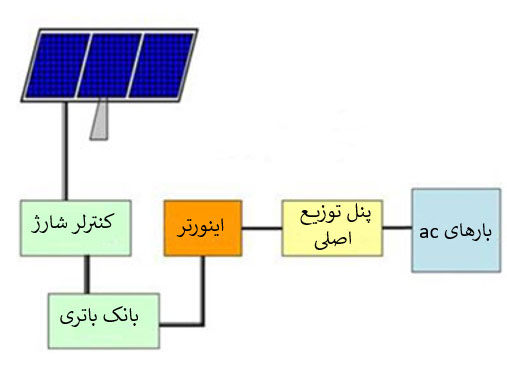
در سیستم های PV خانگی کوچک ، آرایه خورشیدی معمولاً به یک اینورتر منفرد (مرکزی) متصل می شود:
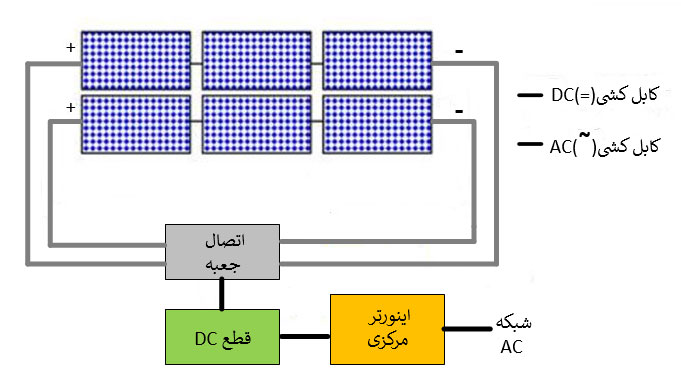
شکل 2:اینورتر مرکزی در یک سیستم انرژی خورشیدی
اینورترهای رشته ای همچنین به عنوان “اینورترهای مرکزی” نیز شناخته می شوند. آنها با آرایه خورشیدی به عنوان یک صفحه خورشیدی واحد رفتار می کنند. مزیت اصلی آنها مقرون به صرفه و نصب آسان است.با این وجود اینورترهای رشته ای دارای یک اشکال قابل توجه هستند – اگر عملکرد یک صفحه خورشیدی از آرایه مختل شود، عملکرد کل آرایه خورشیدی دچار مشکل می شود ، که به نوبه خود منجر به کاهش توان DC ورودی اینورتر و در نهایت توانAC خروجی اینورتر کاهش می یابد.
استفاده از چند اینورتر برای دریافت ولتاژ یا توان بالا:
استفاده از چند اینورتر که به عنوان “انباشته اینورتر” شناخته می شود ، روشی برای دریافت ولتاژ یا توان بالاتر است. این کار به عنوان نتیجه اضافه کردن تعداد بیشتری پنل خورشیدی یا افزایش کل ولتاژ بارهای AC است که توسط اینورتر اداره می شود.به شرط داشتن دو اینورتر سازگار ، شما این امکان را دارید که آنها را به صورت سری سیم کشی کنید و ولتاژ خروجی بالاتری بدست آورید ، یا آنها را به صورت موازی سیم کشی کنید و در نتیجه توان خروجی را افزایش دهید.
به عنوان مثال ، اتصال دو اینورتر 120 ولت AC به صورت سری ، ولتاژ خروجی را به 240 ولت AC افزایش می دهد، در حالی که کل توان خروجی ثابت است. از طرف دیگر ، اگر به صورت موازی دو اینورتر 2000 وات /120 ولت AC را به یکدیگروصل کنید ، کل توان دریافتی شما 4000 وات خواهد بود ، در حالی که ولتاژ خروجی همچنان 120 ولت AC است. با این حال ، یک زوج اینورتر دارای مشکل کاهش بهره وری اینورتر می باشد .
میکرو اینورتر خورشیدی چیست؟
میکرو اینورترها که به عنوان “اینورترهای ماژول” نیز شناخته می شوند دارای توان خروجی نسبتاً کم و کمتر از 250 وات هستند.
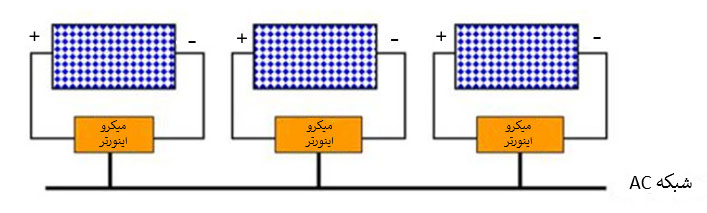
شکل 3:میکرو اینورترهای خورشیدی متصل به صفحه های خورشیدی
میکرو اینورتر بخشی از یک ماژول PV است و به عنوان یک اینورتر مرکزی عمل می کند ، اما تنها برای پنل خورشیدی به آن متصل است. میکرو اینورتر در هر صفحه از آرایه خورشیدی نصب می شوند. از این رو هزینه نصب و هزینه کلی سیستم تمایل به افزایش دارد. با این حال ، میکرو اینورتر بر اشکال اینورترهای رشته (مرکزی) غلبه می کنند.اگر یک پنل خورشیدی ساییده شود و یا دچار نقص عملکرد شود ، این مشکل به هیچ وجه بر عملکرد سایر پنل های خورشیدی تأثیر نمی گذارد.
علاوه بر این ، میکرو اینورتر ها از حداکثر قدرت نقطه پیگیری (MPPT) برای نظارت مداوم بر عملکرد یک صفحه خورشیدی استفاده می کنند و اطمینان حاصل می کنند که حداکثر توان از آن پنل به دست می آید. همچنین ، اگر یک صفحه خورشیدی از کار بیفتد ، ساختار میکرو اینورتر پیدا کردن نقطه خرابی را آسان تر می کند.
به طور معمول ، یک سیستم خورشیدی مبتنی بر میکرو اینورتر ها 16٪ انرژی خورشیدی بیشتر در مقایسه با اینورترهای رشته ای (مرکزی) تولید می کند. علاوه بر این ، بازده اینورتر یک سیستم با میکرو اینورتر می تواند در مقایسه با حداکثر 92٪ راندمان یک اینورتر رشته ای (مرکزی) به 96.5٪ برسد. همچنین ثابت شده است که هنگام اتصال به یک اینورتر مرکزی (رشته ای) ، سایه زنی 9٪ از آرایه خورشیدی منجر به کاهش حدود 54٪ در توان خروجی آن می شود!
مزایا بیشتر میکرو اینورتر ها در مقایسه با اینورترهای مرکزی :
- ایمن تر ، برای نصب و نگهداری ، به دلیل امکان افزایش مقدار ولتاژ در اتصال سری از سیم بندی های اضافی جلوگیری می شود .
- نصب ماژول های PV در سطوح مختلف و رو به جهات مختلف مجاز است.
- اتلاف گرمای بسیار کمتر و از این رو ، نیازی به سیستم خنک کننده فعال نیست که، بدان معنی است که هر اینورتر می تواند بی صدا عمل کند.
- گسترش سیستم پنل خورشیدی آسان تر است – نیاز نیست نگران خرید و نصب یک اینورتر مرکزی دوم و طراحی مجدد کل سیستم باشید.
- میکرو اینورتر ها به دلیل اینکه در معرض توان و گرما کمتری نسبت به اینورترهای مرکزی هستند، از دوام و طول عمر بالاتری نسبت به اینورترهای مرکزی برخوردار هستند. به همین دلیل ، میکرو اینورتر ها دارای ضمانت طولانی تر – 20-25 سال – در مقایسه با 10 سال ضمانت همتای خود اینورتر های مرکزی هستند.
- مشکل میکرو اینورتر ها هزینه بالاتر و مقاومت کمتر در برابر گرما است.
میکرو اینورتر ها همچنین گزینه خوبی برای سیستمهای بزرگتر خورشیدی هستند:
- نیازی به کابل کشی DC نیست.
- سایه زنی یک ماژول و / یا خرابی اینورتر نمی تواند بر بقیه آرایه PV تأثیر بگذارد.
- ولتاژهای مورد استفاده کمتر از 120 ولت AC بوده و بنابراین خطرناکتر هستند.
میکرو اینورتر موازی چیست؟
میکرو اینورترهای موازی دستاورد نسبتاً جدید هستند که مزایای اینورترهای رشته ای و میکرو اینورترها را ترکیب کرده اند.
میکرو اینورترهای موازی یک دستگاه هوشمند است که شامل چهار کانال جداگانه است که می توانند به چهار پنل خورشیدی جداگانه وصل شوند. هر کانال به عنوان یک میکرو اینورتر عمل می کند و می تواند با استفاده از MPPT عملکرد پنل خورشیدی خود را ردیابی کند. همچنین ، یک میکرو اینورتر موازی به عنوان یک اینورتر رشته ای برای هر چهار پنل خورشیدی عمل می کند ، به استثنای اینکه اگر یک پنل خراب شود ، عملکرد سایر پانل های کانال تحت تأثیر قرار نمی گیرد. در واقع ، در صورت خرابی سه تا از چهار صفحه خورشیدی ، این موضوع همچنان صادق است.علاوه بر این ، استفاده از یک میکرو اینورتر موازی نسبت به چهار میکرو اینورتر، از نظر هزینه نصب و سیم کشی ،بسیار به صرفه تر است .
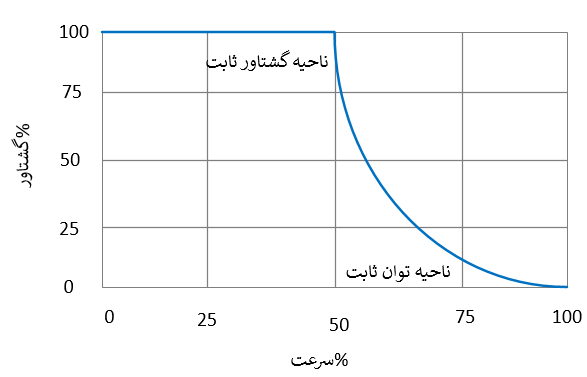
حداکثر توان نقطه ردیابی در اینورتر خورشیدی
بیشتر اینورترهای متصل به شبکه به دلیل MPPT قادر به تأمین حداکثر 20-30٪ انرژی خورشیدی بیشتر هستند و بار مطلوب را به آرایه خورشیدی تحویل می دهند. تغییر مداوم تابش خورشیدی و دمای محیط باعث تغییر مداوم در مشخصات الکتریکی صفحات خورشیدی می شود. بنابراین ، آرایه خورشیدی برای انتقال توان بهینه به دیگر اجزای سیستم خورشیدی، نیاز به بارهای بهینه متفاوت دارد.
اینورترهای MPPT نسبت به اینورترهای غیر MPPT گرانتر هستند.
20-30٪ انرژی خورشیدی اضافی که توسط این آرایه تهیه شده است ، در طولانی مدت نه تنها قیمت بالاتر آن را جبران می کند ، بلکه می تواند صرفه جویی در مصرف انرژی بیشتری را به ارمغان اورد
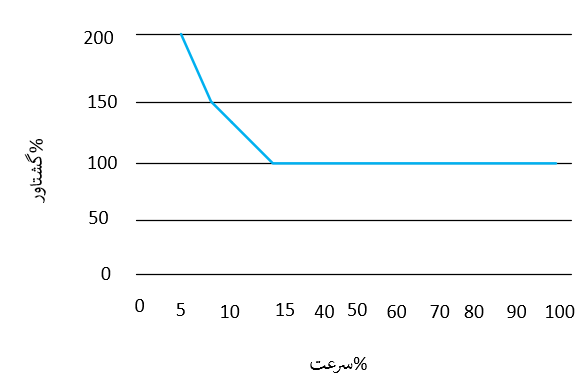
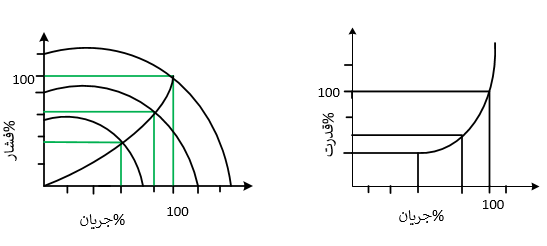
اگر از اینورتر MPPT در سیستم متصل به شبکه خود استفاده می کنید ، با این وجود ، باید اطمینان داشته باشید که حداکثر و حداقل ولتاژ خروجی آرایه خورشیدی در پنجره ردیابی حداکثر نقطه توان اینورتر قرار می گیرد:
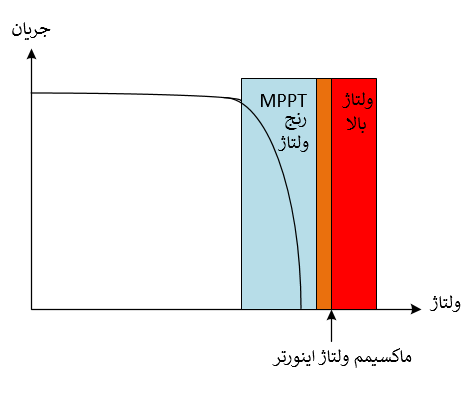
نمودار 1:پنجره ردیابی نقطه حداکثر قدرت اینورتر خورشیدی
چنین پنجره ردیابی با حداکثر و حداقل ولتاژ ردیابی ورودی اینورتر تعریف می شود.
یک آرایه خورشیدی در پایین ترین دمای محیط به حداکثر ولتاژ خروجی خود و در بالاترین دمای محیط به حداقل ولتاژ خروجی خود می رسد.
با عدم مطابقت پنجره ردیابی اینورتر ، در دمای شدید محیط ، یک اینورتر MPPT ردیابی را متوقف می کند و بازده سیستم خورشیدی افت می کند.
بسیار مهم است که اطمینان حاصل شود :
- حداقل ولتاژ خروجی آرایه خورشیدی زیر حداقل ولتاژ ورودی اینورتر قرار نمی گیرد. در غیر این صورت ، اینورتر قادر نیست کار خود را به درستی انجام دهد.
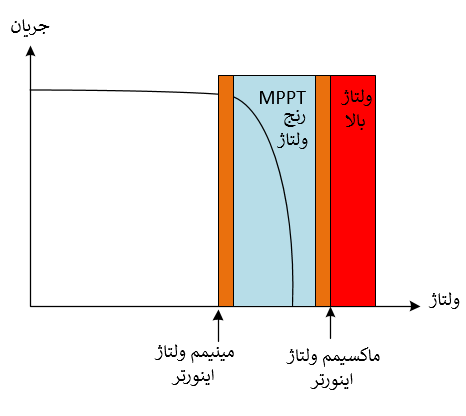
نمودار 2:پنجره ولتاژ ورودی اینورتر خورشیدی
-
- حداکثر ولتاژ خروجی آرایه خورشیدی همیشه کمتر از حداکثر ولتاژ ورودی اینورتر است. اگر حداکثر ولتاژ ورودی بیشتر شود ، اینورتر آسیب می بیند.
- اگر اینورتر کمتر یا بیش از حد بارگذاری شود ، بازده اینورتر کاهش می یابد. بنابراین ، در طولانی مدت هم انرژی خورشیدی و هم پول صرفه جویی شده در قبض های برق را از دست خواهید داد.
- اگر میزان توان اینورتر به طور قابل توجهی پایین تر از توان مورد نیاز بارهای شما باشد ، اینورتر به دلیل درخواست توان بیش از حد از این بارها خاموش می شود ، حتی اگر صفحه خورشیدی شما در آن لحظه قادر به تأمین چنین توانی باشد.
- اینورتر سعی می کند با از بین بردن آن به صورت گرما ، توان بیش از حد را کنترل کند ، که منجر به تولید گرمای بیش از حد می شود.اگر چنین اتلاف گرمایی کافی نباشد ، اینورتر خاموش می شود. لازم به ذکر است ، در نتیجه خاموش شدن و گرم شدن مکرر ، عمر مفید اینورتر کاهش می یابد. بنابراین ، نصب اینورتر در مکانی با تهویه مناسب برای اطمینان از خنک کنندگی مناسب بسیار مهم است. در غیر این صورت ، اینورتر سعی خواهد کرد با کاهش توان خروجی AC تولید شده ، تا زمانی که گرمای بیش از حد به نقطه خاموش شدن برسد ، با خود گرمایشی مقابله کند.
انواع اینورترهای خورشیدی بر اساس نوع تولید شده موج خروجی
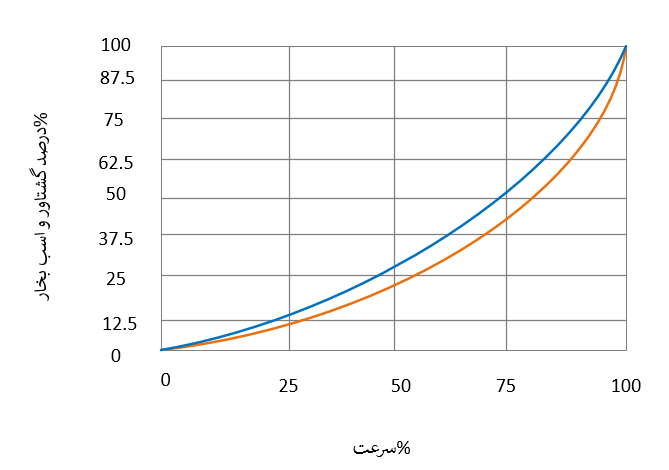
در حال حاضر سه نوع اینورتر مختلف در بازار موجود است – موج سینوسی ، شبه (اصلاح شده) موج سینوسی و موج مربع.
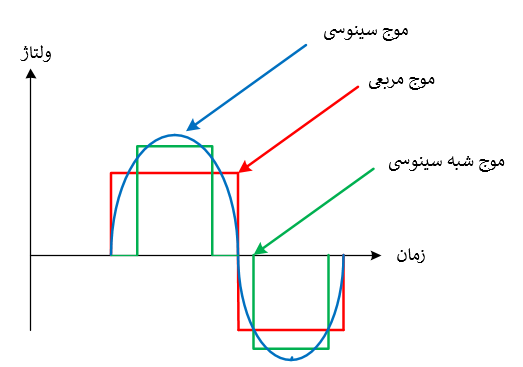
نمودار 3:اینورترهای خورشیدی موج های سینوسی ، شبه (اصلاح شده) موج های سینوسی و موج مربع
برخی از دستگاه های الکترونیکی ، مانند تلفن های همراه ، اجاق های مایکروویو ، کامپیوتر ، جاروبرقی و غیره ممکن است هنگام کار با یک اینورتر شبه سینوسی با مشکل روبرو شوند. علاوه بر این ، اینورترهای شبه موج سینوسی ممکن است برای تجهیزات صوتی و تلویزیونی ایجاد نویز ایجاد کنند. بارهای القایی مانند یخچال ها ، پمپ ها ، مته ها و غیره باید توسط اینورترهای خالص موج سینوسی تغذیه شوند. اینورتر موج مربعی از کیفیت پایین تری نسبت به اینورتر موج سینوسی اصلاح شده برخوردار است.
اگرچه گرانترین آنها (اینورترهای موج سینوسی )تنها انتخاب ممکن برای هر سیستم متصل به شبکه هستند – نه تنها به این دلیل که آنها برای هر کاربردی مناسب هستند ، بلکه به این دلیل که بهترین ها را با الزامات نظارتی قابل اجرا مطابقت می دهند.
مشخصات اینورترهای متصل به شبکه
- میزان توان DC ورودی – معمولاً به دلیل تلفات آرایه خورشیدی 20٪ پایین تر از توان اوج آرایه PV انتخاب می شود.
- میزان ولتاژ DC ورودی – به طور معمول بین 75 ولت (حداقل مقدار) و 750 ولت (حداکثر مقدار) برای بیشتر اینورترهای مورد استفاده در سیستمهای متصل به شبکه مسکونی. ولتاژ خروجی آرایه PV باید در این پنجره ولتاژ باشد.
- میزان حداکثر جریان DC ورودی – همیشه باید بالاتر از جریان اتصال کوتاه آرایه خورشیدی باشد.
- میزان ولتاژ خروجی – 120 ولت AC یا 240 ولت AC .
- میزان فرکانس خروجی – 50 هرتز در اروپا ، 60 هرتز در ایالات متحده آمریکا است.
- کارآیی – درصد تلفات ناشی از تبدیل DC به AC .
انتخاب اینورتر برای سیستم متصل به شبکه
1) قدرت خروجی اینورتر باید (0.9 _ 0.95) از بالاترین توان آرایه خورشیدی باشد.
2) حداکثر ولتاژ آرایه خورشیدی باید کمتر از حداکثر ولتاژ ورودی DC اینورتر باشد.
3) حداقل ولتاژ مجاز اینورتر باید از حداقل ولتاژ DC آرایه PV کمتر باشد.
4) دامنه ولتاژ کاری آرایه PV باید در محدوده ولتاژ MPPT اینورتر باشد.
5) حداکثر جریان آرایه PV باید کمتر از حداکثر جریان DC ورودی اینورتر باشد.
اینورتر برای سیستمهای متصل به شبکه با باتری پشتیبان
اینورترهای مبتنی بر باتری را می توان در سیستمهایی با ذخیره انرژی استفاده کرد – سیستمهای مبتنی بر باتری متصل به شبکه یا سیستمهای مستقل (خارج از شبکه).
اینورتر مبتنی بر باتری برای سیستم متصل به شبکه مبتنی بر باتری :
- برای تأمین انرژی دستگاههای خانگی ، توان DC را به برق AC تبدیل می کند.
- برای شارژ باتری ، برق AC را از شبکه به برق DC تبدیل می کند.
اگر باتری کاملاً شارژ شده باشد و هیچ بار به سیستم وصل نشود ، کل نیرو تولید شده توسط آرایه PV به شبکه ارسال می شود. اگر آرایه PV توان بیشتری نسبت به اینورتر داشته باشد ، در صورت عدم استفاده از این منبع DC ، از توان باقیمانده استفاده نمی شود و اینورتر نیز با راندمان کمتری کار می کند.
اینورترهای متصل به شبکه با باتری پشتیبان پیچیده تر و گران تر از اینورترهای متصل به شبکه با مصرف باتری کمتر هستند زیرا علاوه بر ارسال برق به شبکه ، از آنها انتظار می رود:
- پس از قطع برق ، باتری را شارژ کنید.
- در هنگام قطع برق ، تمام بارهای پشتیبانی شده را تأمین کنید.
مشخصات اینورترهای متصل به شبکه دارای باتری پشتیبان
- توان ورودی – در مقایسه با اینورترهای کم مصرف متصل به شبکه ، در اینجا اینورتر باید قادر باشد نه تنها توان DC تحویل داده شده توسط آرایه PV بلکه تمام بارهای پشتیبان گرفته شده را یه صورت همزمان کنترل کند.
- ولتاژ ورودی DC پذیرفته شده از جانب بانک باتری ، معمولاً 12 ولت ، 24 ولت و 48 ولت است.
- ولتاژ خروجی – 120 ولت AC یا 240 ولت AC .
- فرکانس خروجی – 50 هرتز در اروپا ، 60 هرتز در ایالات متحده .
- ظرفیت پیشرانه – به اینورتر اجازه می دهد تا در مدت زمان کوتاه ، توان خروجی بیشتری نسبت به مقدار مجاز خود را تأمین کند ، به منظور تأمین جریان راه اندازی (در یخچال ، پمپ آب و غیره)
هنگام انتخاب اینورتر برای سیستم متصل به شبکه ، توان خروجی آرایه خورشیدی در نظر گرفته نمی شود ، زیرا بانک باتری بین اینورتر و آرایه خورشیدی قرار دارد. در یک سیستم متصل به شبکه با باتری پشتیبان،توان خروجی آرایه خورشیدی و خروجی توان باتری باید در نظر گرفته شوند. اگر باتری ها به طور کامل شارژ شده باشند و به هیچ باری وصل نشده باشد ، اینورتر باید قادر به ارسال تمام انرژی خورشیدی تولید شده به دکل برق باشد.
در این شرایط ، اگر آرایه PV توان بیشتری را نسبت به اینورتر فراهم کند تا بتواند وارد جریان AC شود و به شبکه بفرستد ، از انرژی اضافی استفاده نمی شود ، و آرایه PV قادر به کار در حداکثر راندمان خود نخواهد بود. در نتیجه ، سیستم شما در حال ارسال انرژی کمتری به شبکه است.
اینورتر / شارژرها
اینورتر / شارژرها در سیستم های متصل به شبکه مبتنی بر باتری استفاده می شوند:
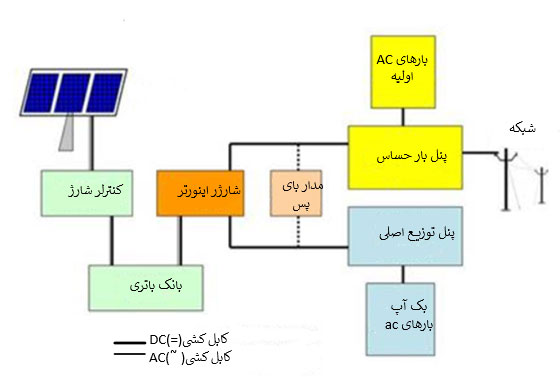
شکل 4:شارژرهای اینورتر خورشیدی
در یک سیستم خورشیدی غیر متصل به شبکه ، از صفحه های خورشیدی به طور معمول برای شارژ بانک باتری استفاده می شود. اما در زمستان ، هنگامی که روزها کوتاه تر و تابش نور خورشید کمتر است ، صفحه های خورشیدی به تنهایی قادر به شارژ باتری ها نیستند. در چنین شرایطی ، منبع تغذیه اضافی برای شارژ کامل باتری مورد نیاز است. چنین منبع انرژی می تواند یک دیزل ژنراتور باشد که به جای برق DC ، برق AC تولید می کند. بنابراین برای شارژ باتری ها به دستگاهی نیاز دارید تا بتوانید برق تولید شده را به برق DC تبدیل کنید. همچنین اگر لوازم خانگی AC دارید ، به اینورتر نیاز دارید تا بتوانید جریان DC را از بانک باتری به برق AC تبدیل کنید. غالباً یک دستگاه واحد می تواند این دو عملکرد معکوس را متحد کند و به چنین دستگاهی “اینورتر / شارژر” گفته می شود. این دستگاه به عنوان مبدل دو طرفه – AC به DC و DC به AC – عمل می کند و همچنین می تواند برخی از ویژگی های اضافی مانند روشن کردن دیزل ژنراتور در صورت عدم تابش نور خورشید و شارژ باتری کم ارائه دهد. علاوه بر شبکه های مسکونی ، از اینورتر / شارژرها در سیستمهای خورشیدی دریایی نیز استفاده می شود ، جایی که توان ساحل “منبع انرژی اضافی” است که در صورت عدم تابش نور خورشید برای شارژ باتری ها استفاده می شود.
قابلیت اینورتر / شارژرها
استفاده دیگر از اینورتر / شارژرها در سیستم های متصل به شبکه مبتنی بر باتری است که در صورت خرابی شبکه از باتری ها به عنوان منبع تغذیه پشتیبان استفاده می شود. بنابراین در صورت کمبود نور خورشید ، قادر به نگه داشتن باتری ها در حالت شارژ کامل نیست ، شارژر اینورتر با استفاده از توان AC از شبکه می تواند باتری ها را شارژ کند.
برخی از اینورتر / شارژرها ، که به عنوان “اینورترهای هیبریدی خورشیدی” نیز شناخته می شوند ، دو ورودی AC دارند. اولین ورودی به دکل برق وصل می شود ، در حالی که دیگری می تواند به یک ژنراتور AC اضافی (به عنوان مثال دیزل) وصل شود. هنگامی که خورشید می تابد ، انرژی خورشیدی تولید شده در حال شارژ باتری ها است. در صورت تابش نور خورشید و در صورت روشن بودن شبکه ، اینورتر هیبریدی باتری را از شبکه شارژ می کند. در صورت عدم موفقیت شبکه ، اینورتر هیبریدی ژنراتور AC را روشن می کند و شارژ باتری ها از ورودی AC دیگر انجام می شود. وقتی شبکه هنوز خاموش است اما خورشید شروع به تابیدن می کند ، اینورتر ژنراتور را خاموش می کند و باتری ها توسط آرایه خورشیدی شارژ می شوند. اینورتر / شارژر نمی تواند کنترلر شارژ خورشیدی را جایگزین کند ، زیرا شارژرهای اینورتر تنها می توانند باتری را از طریق منبع تغذیه AC اداره کنند – یک مولد AC (به عنوان مثال دیزل) ، دکل برق (برای سیستم های پنل خورشیدی مسکونی) یا قدرت ساحل. (در صورت سیستم های صفحه های خورشیدی تلفن همراه / دریایی خارج از شبکه). در صورت گرفتن شارژ باتری از پنل های خورشیدی ، کنترل شارژ خورشیدی ضروری است.
ویژگی شبکه هوشمند
“شبکه هوشمند” یکی دیگر از ویژگی های اینورتر / شارژرها است. این ویژگی می تواند دستگاه را برای اتصال بارهای AC به شبکه در یک لحظه مناسب برنامه ریزی کند ، به عنوان مثال شب هنگامی که نرخ صورتحساب پایین است .علاوه بر اتصال به شبکه ، این ویژگی همچنین می تواند باتری ها را در سیستم متصل به شبکه با باتری های پشتیبان شارژ مجدد کند . هنگامی که نرخ صورتحساب زیاد است – معمولاً در ساعات روز – بارها از شبکه جدا می شوند و در عوض بر روی انرژی خورشیدی کار می کنند. مهمترین مزیت ویژگی “شبکه هوشمند” این است که باعث کاهش مصرف برق از شبکه و در نتیجه کاهش مبلغ صورتحساب برق شما می شود.
ویژگی اوج اصلاح
ویژگی “اوج اصلاح” می تواند به عنوان مکمل “شبکه هوشمند” عمل کند. در طول “اوج اصلاح” ، ابتدا انرژی حاصل از شبکه هنگام شروع به کار برخی از بارهای پرمصرف (از جمله بارهای دیگر AC )استفاده می شود و سپس تمام بارها برای دستیابی به انرژی از آرایه خورشیدی تغییر می کنند. این ویژگی هوشمند نیاز به یک اینورتر گران قیمت و با توان بالا را از بین می برد.
بعضی از اینورترها این امکان را دارند که بطور خودکار جریان ورودی AC خود را که جریان خروجی یک ژنراتور خارجی است در صورت وجود کاهش دهند. اگر جریان کلی بارهای متصل AC از حداکثر جریان خروجی ژنراتور خارج شود ، این ویژگی از بارگیری بیش از حد ژنراتور جلوگیری می کند.
در صورت داشتن اینورتر / شارژر با خروجی 120/240 ولت AC ،امکان استفاده از بارهای 240 ولت AC (مانند پمپ های آب) امکان پذیر است اما این تنها راه برای انجام این کار نیست.
در حالی که گزینه انباشته کردن دو اینورتر / شارژر تک فاز 120 ولت AC به صورت سری برای بدست آوردن ولتاژ خروجی کل 240 ولت AC قبلاً در بالا ذکر شده بود ، روش خوب دیگر اتصال یک اتو ترانسفورمر به خروجی اینورتر است.
در صورتی که تقریبا 120 ولت AC بار در دسترس باشد ، اما گاهی اوقات به برق 240 ولت AC نیاز دارد ، این یک روش مقرون به صرفه برای دو برابر کردن ولتاژ خروجی است.
اینورتر / شارژ را می توان با طیف گسترده ای از ویژگی های نظارت مربوط به کلیه دستگاه های ممکن وصل شده فراهم کرد – باتری (وضعیت شارژ و دما) ، مولد برق اضافی (تولید ژنراتور خودکار در صورت لزوم) یا بارهای (ردیابی و جدا کردن همه آنها یا فقط موارد غیر مهم فقط از این طریق مانع از آسیب رسیدن باتری یا ژنراتور خارجی می شوند).
اینورترهای خورشیدی غیر متصل به شبکه( خارج از شبکه)
اینورترهای خارج از شبکه با اینورترهای متصل به شبکه تفاوت دارند.
یک سیستم خورشیدی خارج از شبکه اگر تنها به بارهای DC برق داده شود، نمی تواند حاوی اینورتر باشد. از آنجا که سیستم های خارج از دکل برق جدا هستند ، نیازی نیست که اینورترهای خارج از شبکه با الزامات و مقررات دکل برق مطابقت داشته باشند. عملکرد اصلی اینورتر خارج از شبکه تبدیل ولتاژ خروجی بانک باتری یا آرایه خورشیدی به ولتاژ AC است. هر سیستم خورشیدی خارج از شبکه نیاز به اینورتر ندارد. اگر بخواهید فقط بارهای DC تأمین شود ، اینورتر لازم نیست:
1) سیستم فتوولتائیک خارج از شبکه اینورتر با بانک باتری:
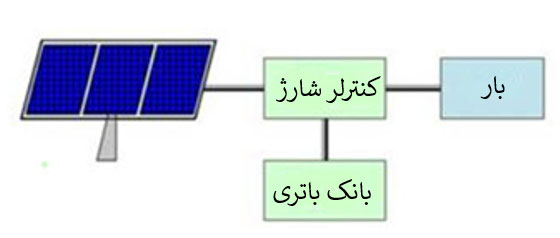
شکل 5:سیستم فتوولتائیک خارج از شبکه اینورتر با بانک باتری
2) سیستم فتوولتائیک خارج از شبکه اینورتر بدون بانک باتری:
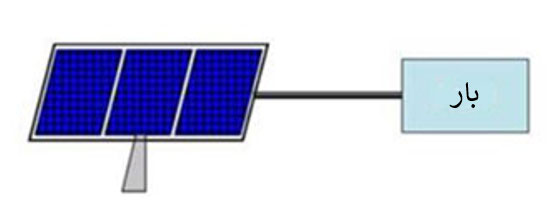
شکل 6:سیستم فتوولتائیک خارج از شبکه با اینورتر بدون بانک باتری
سیستم های فتوولتائیک متصل به شبکه و خارج از شبکه از انواع مختلفی از اینورترها استفاده می کنند.
دو نوع اینورتر برای سیستمهای خارج از شبکه وجود دارد.
- یک اینورتر خارج از شبکه که مستقیماً به آرایه خورشیدی متصل است ، بنابراین انرژی AC را مستقیماً برای بارهای AC تأمین می کند:
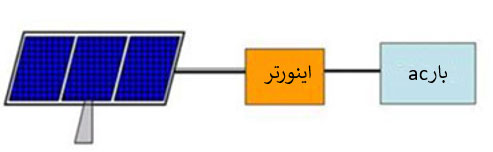
شکل 7:اینورتر خارج از شبکه
- یک اینورتر با باتری پشتیبان که به یک باتری وصل می شود.
- یا مستقیم
شکل 8:اینورتر پشتیبان گیری باتری به طور مستقیم به یک باتری متصل است.
یا توسط یک قطع کننده DC :
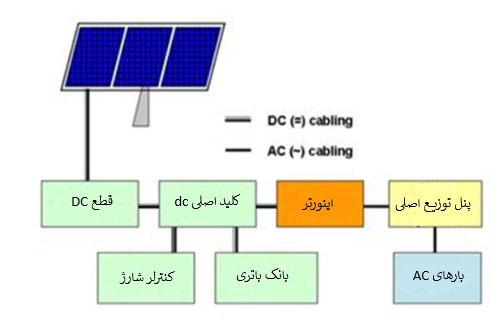
شکل 9:اینورتر پشتیبان گیری باتری متصل به باتری از طریق قطع کننده DC
برای تبدیل مؤثر باتری برق DC به برق AC ، دامنه ولتاژ ورودی اینورتر باید با دامنه ولتاژ بانک باتری مطابقت داشته باشد. ولتاژ بانک باتری هنگام تخلیه باتری به کمترین مقدار خود می رسد و به همین ترتیب هنگام شارژ کامل باتری ها بیشترین مقدار آن است. اینورترهای خارج از شبکه بسته به نوع و اندازه سیستم های PV ، در خروجی های مختلف برق تولید می شوند.
اینورتر 100 وات برای سیستم کوچک خارج از شبکه و اینورتر 5 کیلو وات برای تأمین برق تمام بارهای احتمالی در یک خانه وجود دارد.
یکی دیگر از ویژگیهای اساسی اینورترهای خارج از شبکه این است که ورودی DC آنها فقط برای تعداد محدودی از ولتاژهای (DC 12 ولت ، 24 ولت و 48 ولت)در دسترس است ، به این دلیل که ورودی اینورتر به خروجی باتری که در این ولتاژ های DC می آید متصل شده است.
در اینورترهای متصل به شبکه وضعیت متفاوت است – ورودی اینورتر خروجی آرایه خورشیدی است. ولتاژ خروجی به دلیل فرصتی برای اتصال تعدادی پنل خورشیدی در یک رشته ، می تواند در ولتاژ بسیار متفاوت باشد.
اگر هم از دکل برق و هم از ژنراتور به عنوان منبع تغذیه AC استفاده می کنید ، نیاز به یک اینورتر متصل به شبکه مبتنی بر باتری دارید که از چندین منبع برق پشتیبانی می کند.
کاربرد اینورتر موج سینوسی،شبه سینوسی و موج مربع
سه نوع متفاوت اینورتر مستقل در حال حاضر در بازار وجود دارد ، با توجه به نوع تولید شده از موج ولتاژ – موج سینوسی ، شبه (اصلاح شده) موج سینوسی و موج مربعی. اینورترهای موج سینوسی اصلاح شده در سیستم های ساده و ارزان قیمت پنل خورشیدی استفاده می شوند. آنها با چراغ ها ، موتورها ، یخچال ها و سایر تجهیزات غیر الکترونیکی به خوبی کار می کنند. با این حال ، به طور کلی ، باعث تداخل در بیشتر تجهیزات رادیویی و الکترونیکی ، مانند تلویزیون (بویژه جدیدترین مدل ها) ، سیستم های صوتی ، رایانه ها ، لپ تاپ ها و ساعت های دیجیتال می شوند. بنابراین ، این اینورترها یک انتخاب مناسب برای کیت های خورشیدی اضطراری یا سیستم های خورشیدی خارج از شبکه با نیازهای الکتریکی کاملاً ساده هستند. این اینورترها بیشترین کاربرد را در سیستمهای صفحه خورشیدی مسکونی خارج از شبکه دارند و همچنین اغلب در کاربرد های خورشیدی متحرک استفاده می شوند. آنها گران تر از نوع اصلاح شده موج سینوسی هستند اما از کیفیت بالاتری نیز برخوردار هستند. اینورترهای موج سینوسی خالص با هر دستگاه الکترونیکی سازگار هستند. اینورترهای خالص موج سینوسی در سیستم پنل خورشیدی خارج از شبکه بزرگتر و همچنین در سیستم های متصل به شبکه ضروری هستند. قیمت اینورترهای خالص موج سینوسی همچنان در حال کاهش است. این اینورترها در اندازه های مختلف – از 100 وات تا 7000 وات – عرضه می شوند و می توانند به راحتی با مورد خاص شما در مورد بارهای الکتریکی ترکیب شوند. همچنین ، اینورترهای خالص موج سینوسی می توانند برای تحمل بارهای الکتریکی بزرگتر در سیستم های پیچیده تابلوی خورشیدی جمع شوند.
مشخصات اینورتر خارج از شبکه
- توان ورودی – معمولاً به دلیل تلفات مختلف در پنل های خورشیدی ، 20٪ کمتر از مقدار پیک توان آرایه PV انتخاب می شوند.
- توان خروجی – باید به اندازه کافی باشد ، به گونه ای که اینورتر قادر به تحمل تمام بارهایی باشد که به طور همزمان کار می کنند.
- ولتاژ ورودی DC که از بانک باتری پذیرفته شده است – مقادیر نرمال ، ولتاژ 12 ولت ، 24 ولت و 48 ولت است.
- ولتاژ خروجی – معمولاً 120 ولت AC یا 240 ولت AC .
- فرکانس خروجی – 50 هرتز در اروپا ، 60 هرتز در ایالات متحده آمریکا است.
- ظرفیت پیشرانه – به اینورتر اجازه می دهد تا در مدت زمان کوتاه ، توان خروجی بیشتری نسبت به مقدار مجاز خود را تأمین کند ، به منظور تأمین جریان راه اندازی (در یخچال ، پمپ آب و غیره)
اندازه اینورتر خارج از شبکه
تخمین اندازه اینورتر خورشیدی از اهمیت بالایی برخوردار است زیرا اینورتر قرار است برق DC تأمین شده توسط باتری را کنترل کند و آن را به بارهای AC عرضه کند.اینورتر باید بتواند کلیه دستگاههای AC را که به طور همزمان وصل می شوند (مجموع توان AC ) اداره کند. اینورتر همچنین می بایست قادر به کنترل (جریان هجومی ) تولید شده توسط برخی از بارهای در هنگام شروع کار باشد.
مهمترین پارامتر هر اینورتر رتبه بندی مداوم یا وات پیوسته آن است. این مقدار کل واتی را نشان می دهد که اینورتر باید از عهده آن برآید یا به عبارت دیگر ، وات پیوسته به معنی تمام وسایل الکتریکی AC است که انتظار می رود اینورتر همزمان از آن استفاده کند. به طور معمول ، توان پیوسته اینورتر برابر با کل قدرت نصب شده آرایه خورشیدی (مقدار ماکسیمم وات) انتخاب می شود. رتبه پیوسته همچنین می تواند کمی بالاتر از کل انرژی خورشیدی نصب شده باشد اما خیلی زیاد نیست زیرا راندمان اینورتر کاهش می یابد. اگر می خواهید مطمئن باشید که آیا اینورتر با رتبه پیوسته برابر با توان نصب شده قادر به تحمل تمام بارهای موجود در خانه شماست که قصد استفاده همزمان آنها را دارید ، باید رتبه بندی این وسایل را با هم جمع کنید. آنچه در نهایت دریافت می کنید باید کمتر از رتبه پیوسته اینورتر باشد. در غیر این صورت ، شما یا باید یک اینورتر با رتبه بالاتر را انتخاب کنید یا به فکر کاهش تعداد دستگاه های AC مورد استفاده به صورت همزمان باشید.
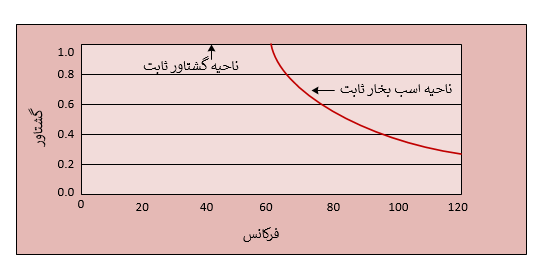
پارامتر مهم دیگر ، میزان افزایش قدرت اینورتر یا افزایش وات:
توانی است که اینورتر برای مدت بسیار کوتاه می تواند از آن پشتیبانی کند. رتبه بندی پیشرانه بسیار بیشتر (به عنوان مثال x2) نسبت به رتبه بندی پیوسته است و به دستگاه هایی اختصاص داده شده است که در زمان شروع کار ، اوج مصرف برق لحظه ای دارند – برای مثال ، موتورها یا سایر بارهای القایی. با شروع کار ، چنین وسایلی معمولاً نیاز به توان بسیار بالاتری نسبت به مصرف اسمی آنها دارند. برای اینکه اینورتر بتواند چنین “افزایش” هایی را کنترل کند ، نرخ افزایش آن باید حداقل برابر با میزان افزایش وات مورد انتظار از این دستگاهها باشد. میزان افزایش وات لوازم خانگی را می توان در برچسب پشت آن یافت. یک فرض رایج برای تخمین افزایش وات، ضرب کل وات AC در 3 است. با این حال ، بسیاری از دستگاه های خانگی پس از راه اندازی ، افزایش ناگهانی ایجاد نمی کنند. دستگاه های دارای افزایش وات ،یخچال ، ماشین لباسشویی و پمپ ها هستند. هنگام انتخاب اندازه اینورتر ، فراموش نکنید که رتبه افزایش اینورتر را با نیازهای مورد انتظار سیستم پیش بینی کنید.
نکته مهم دیگر ، ولتاژ ورودی اینورتر است. بسته به اینکه ولتاژ سیستم شما 12ولت ، 24ولت یا 48ولت باشد ، اینورتر شما باید دارای ولتاژ ورودی 12 ولت ، 24 ولت یا 48 ولت باشد.
سایر معیارهای اساسی هنگام انتخاب اندازه اینورتر تطبیق ولتاژ ورودی اینورتر با ولتاژ اسمی باتری و انتخاب ولتاژ خروجی AC مورد نظر (120 یا 240 ولت AC ) می باشند.
انتخاب اینورتر خارج از شبکه
در سیستم های الکتریکی خورشیدی خارج از شبکه ، یک اینورتر به گونه ای طراحی می شود که بتواند به یک دستگاه AC تنها یا تمام بارهای AC را که باید به آن وصل شوند ، برق بدهد. اینورتر برای کنترل حداکثر تقاضا الکتریکی باید اندازه گیری شود. همچنین اینورتر باید با ولتاژ سیستم (یعنی ولتاژ باتری و کنترل کننده شارژ) مطابقت داشته باشد. رایج ترین اینورترها برای ولتاژ سیستم 12 ولت یا 24 ولت هستند ، در حالی که اینورترهای 48 ولت در سیستم های خورشیدی بزرگتر مورد استفاده قرار می گیرند. برای انتخاب اینورتر برای سیستم خارج از شبکه ، باید تخمین بار (یا آنالیز بار) را انجام دهید. تخمین بار مربوط به بارهایی است که می خواهید از آنها استفاده کنید و چه مدت از آنها استفاده خواهید کرد. تخمین بار همچنین خلاصه می کند که چه تعداد از دستگاههای AC شما می خواهید استفاده کنید و کدام یک از آنها همزمان کار می کنند. اینورتر باید قادر به تحمل تمام بارهای AC باشد که به طور همزمان کار می کنند. علاوه بر این ، اینورتر باید قادر به افزایش این بارها باشد.
در هنگام خرید یک اینورتر ، توجه به اضافه کردن بارهای جدید AC به سیستم نیز مهم است. همچنین باید در نظر بگیرید که کدام یک از بارها به صورت همزمان با هم کار می کنند . نکته آخر اینکه باید یک اینورتر قابل تعمیر خریداری کنید .